23
The author perfected this article on December 31th, 2019
Abstract
This article presents an overview of the most important power supply topologies and most popular circuit topologies used in today's switched-mode power conversion. There are many more topologies, but most are combinations or variations of the ones presented here. Each topology contains a unique set of design trade-offs: Voltage stress on the switches, chopped vs. smooth input and output currents and utilization of the transformer windings. Choosing the best topology requires a study of Input and output voltage ranges, current ranges, cost vs. performance, size and weight. The main object is to guide the designer in selecting the topology with its associated power semiconductor devices.
Catalogs
Abstract | |
I Introduction | |
Ⅱ The Basic of Pulse-Width Modulated Waveform | 1. Duty Cycle |
2. Duty Ratio | |
Ⅲ The Most Popular Topologies | 1. Buck |
2. Boost | |
3. Buck-Boost | |
4. Flyback | |
5. Forward | |
6. Two Transistor Forward | |
7. Push-Pull | |
8. Half-Bridge | |
9. H-bridge (Full-Bridge) | |
10. Resonant LLC | |
11. Single-Ended Primary Inductor Converter (SEPIC) | |
12. Ćuk | |
Ⅳ Details of the Circuit Operation | 1. Buck Regulator (Continuous Conduction) |
2. Buck Regulator (Critical Conduction) | |
3. Buck Regulator (Discontinuous Conduction) | |
4. Boost Regulator | |
5. Transformer Operation (Including Effect of Primary Inductance) | |
6. Flyback Transformer (Really a Multi-Winding Inductor) | |
7. Forward Converter Transformer | |
V. Book Suggestions |
I Introduction
The ubiquitous linear power supply of old has been on a steady decline for years, ever since the advent of Switch Mode Power Supplies (SMPS). The clear advantage to SMPS over linear supplies has been size and efficiency, and as the world-wide energy crises looms on the international, commercial and political scene, we have seen the trend to SMPS only accelerate.
So what is a power supply topology? Switch mode power supply (SMPS) circuits contain networks of energy storage inductors and capacitors as well as power handling transistors and rectifiers. Their particular configuration is referred to as a topology. Although there is a wide variety of converter topologies, only about a dozen basic ones are used in practical power design. They can be classified into two major families: buck and flyback depending on the method of operation. In the buck family energy is transferred from the input to the load during the conduction cycle of a switching transistor. In the flyback family the energy is accumulated during "on-state" of a switch and delivered to the output during the "off-state". Any practical circuit belongs to one of these two configurations or their combination. Examples of the buck type are forward and bridge converters. Examples of the flyback type are inverting and boost regulators. Here is an application report of designing switch mode power supplies with TL598 from TI, about the more details and datasheet of TL598 you can also find in Kynix.
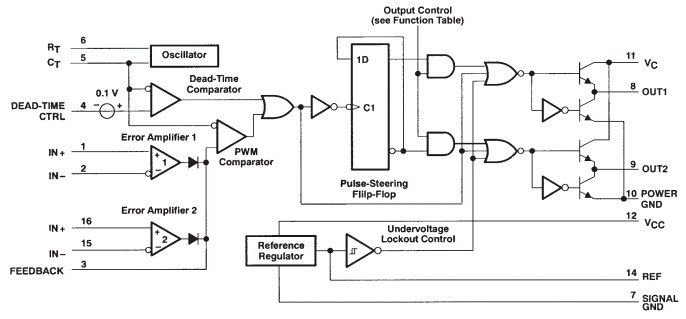
Application Report of Designing Switch Mode Power Supplies with TL598
When designing power supply, typically the design criteria favors a switch mode power supply over a linear power supply. When it comes to deciding which SMPS topology to use, the decision can often be more difficult. Selecting the wrong topology can result in a design project that does not meet your cost targets, efficiency goals or a host of other requirements that you might have. Below we discuss some of the more common topologies and their features. These topologies all relate to switched-mode circuits.
Basics of Switching Mode Power Supplys
Ⅱ The Basic of Pulse-Width Modulated Waveform
PWM is a powerful and commonly used technique for controlling the analog circuits or power to inertial electrical devices and made practical by a processor’s digital output such as the modern electronic power switches.
A digital device like a microcontroller can easily work with inputs and outputs. It has only two states, on and off. So you can use it to control a LED’s state such as on or off. In the same way, you can use it to control any electrical device on and off by using proper drivers such as transistor, relays, etc. But sometimes you need more than just "on" and "off" control over the device. For example you want to control the brightness of a LED or any lamp, or the speed of DC motor, then the digital signal (on/off) simply can’t do it. This situation is very smartly handled by a technique called PWM or Pulse Width Modulation. PWM is the technique used to generate analogue signals from a digital device like a MCU. Digital control is used to create a square wave, a signal switched between on and off. This on-off pattern can simulate voltages in between full on (5V) and off (0V) by changing the portion of the time the signal spends on versus the time that the signal spends off. The duration of "on time" is called the pulse width. To get varying analog values, you might change or modulate the pulse width. If you repeat this on-off pattern fast enough with an LED for example, the result is as if the signal is a steady voltage between 0V and 5V controlling the brightness of the LED. PWM is using digital pulses to create some analog value other than just 'high' and 'low' signal levels.
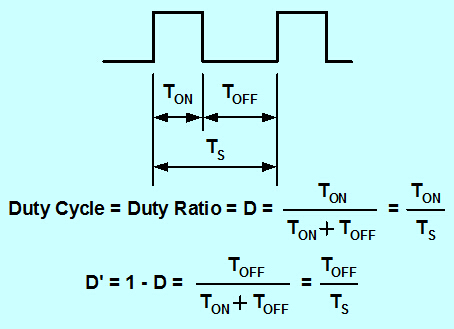
1. Duty Cycle
When the signal is high, we call this “on time”. To describe the amount of "on time”, we use the concept of duty cycle. Duty cycle is measured in percentage. The percentage duty cycle specifically describes the percentage of time a digital signal is on over an interval or period of time. This period is the inverse of the frequency of the waveform.
2. Duty Ratio
Duty Ratio is the proportion of time during which a component, device, or system is operated. The duty ratio can be expressed as a ratio or as a percentage. Suppose a disk drive operates for 1 second, then is shut off for 99 seconds, then is run for 1 second again, and so on. The drive runs for one out of 100 seconds, or 1/100 of the time, and its duty ratio is therefore 1/100, or 1 percent. The more a circuit, machine or component is used, the sooner it will wear out. Therefore, the higher the duty ratio, the shorter the useful life, all other things being equal.
Definition of the basic pulse-width modulated waveform is as follows:
Ⅲ The Most Popular Topologies
1. Buck
Buck converters are one of the simplest, cheapest and most common topologies. While this topology is not suited for applications where isolation is required, it is ideal as a DC to DC converter used to step- down voltages. Not only can you achieve high efficiency levels, but also high power levels using a buck converter, especially with poly-phase topologies. The down side to buck converters is that the input current is always discontinuous, resulting in higher EMI.
However, EMI issues can be addressed with filter components such as chip beads, common mode chokes and filter chokes.
The buck topology only requires a single inductor for single-phase applications, and catalog inductors for a wide range of applications are available. In addition, custom inductors can be developed for those special inductance versus current values that are required, as well as for applications requiring extra windings for sensing or supplying power to the controller.
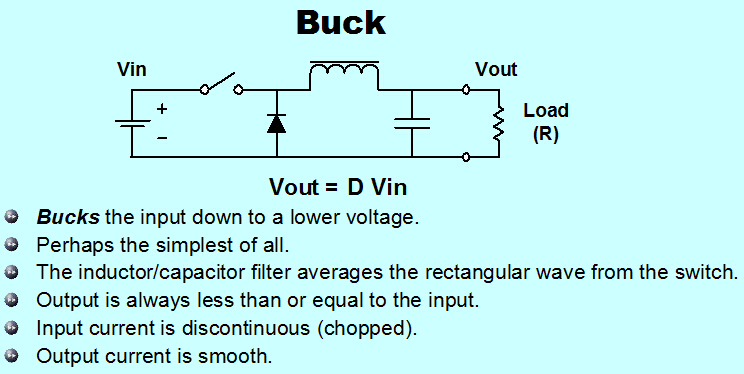
Buck
2. Boost
The boost topology, like the buck topology, is non-isolating. Unlike the buck topology, the boost steps up the voltage rather than stepping it down. Because the boost topology draws current in a continuous, even manner when operating in continuous conduction mode, it is an ideal choice for Power Factor Correction circuits. Like the buck topology, there are many catalog choices for the inductor used in boost circuits, and where there is a special need, custom inductors are available as well.
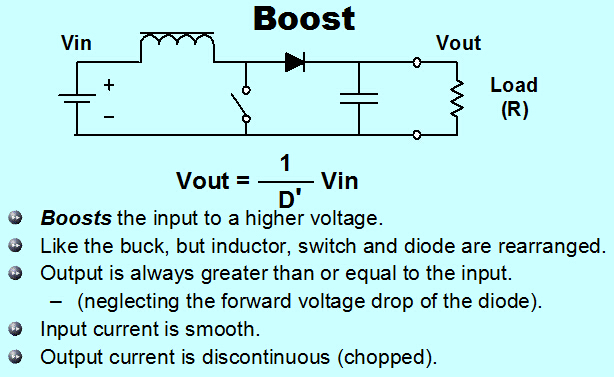
Boost
3. Buck-Boost
The buck-boost topology can either step the voltage up or down. This topology is particularly useful in battery powered applications, where the input voltage varies over time but has the disadvantage of inverting the output voltage. Another disadvantage to the buck-boost topology is that the switch does not have a ground, which complicates the drive circuit. Using only a single inductor like the buck and the boost topologies, the buck-boost inductor and EMI components are readily available.
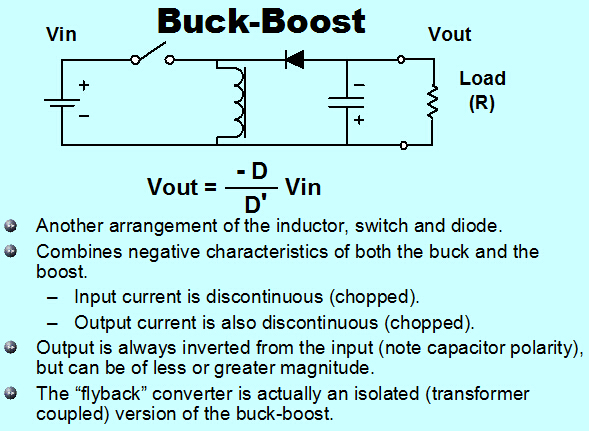
Buck-Boost
4. Flyback
The flyback topology is essentially the buck-boost topology that is isolated by using a transformer as the storage inductor. The transformer not only provides isolation, but by varying the turns ratio, the output voltage can be adjusted. Since a transformer is used, multiple outputs are possible. The flyback is the simplest and most common of the isolated topologies for low-power applications. While they are well suited for high-output voltages, the peak currents are very high, and the topology does not lend itself well to output current above 10A.
One advantage of the flyback topology over the other isolated topologies is that many of them require a separate storage inductor. Since the flyback transformer is in reality the storage inductor, no separate inductor is needed. This, coupled with the fact that the rest of the circuitry is simple, makes the flyback topology a cost effective and popular topology.
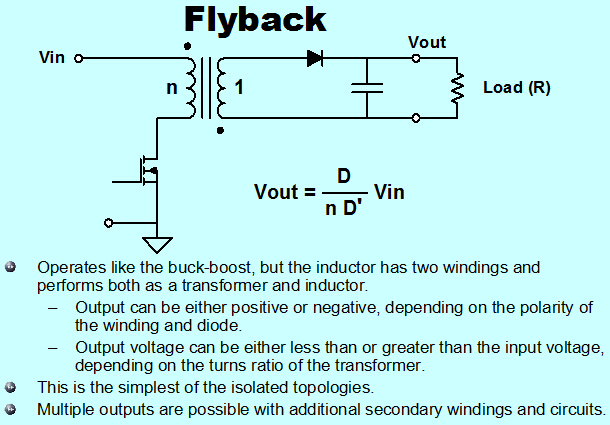
Flyback
5. Forward
The forward converter is really just a transformer isolated buck converter. Like the flyback topology, the forward converter is best suited for lower power applications. While efficiency is comparable to the flyback, it does have the disadvantage of having an extra inductor on the output and is not well suited for high voltage outputs. The forward converter does have the advantage over the flyback converter when high output currents are required. Since the output current is non-pulsating, it is well suited for applications where the current is in excess of 15A.
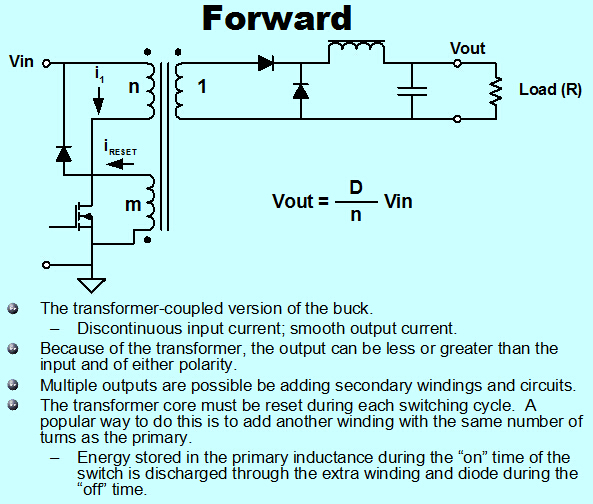
Forward
6. Two Transistor Forward
The two-transistor topology is a very reliable design that does not stress the transistors with voltage spikes. The Two Transistor Forward Converter belongs to the primary switched converter family since there is isolation between input and output. It is suitable for output powers up to several hundred Watts. The two transistors are simultaneously turned on and off by a pulse-width-modulated control voltage.
![]()
Two Transistor Forward
7. Push-Pull
The push-pull topology is essentially a forward converter with two primary windings used to create a dual drive winding. This utilizes the core of the transformer much more efficiently than the flyback or the forward converters.
On the other hand, only half the copper is being used at a time, thereby increasing the copper losses significantly in a similar sized transformer. For similar power levels, the push-pull converter will have smaller filters compared to the forward converter.
However the advantage that push-pull converters have over flyback and forward converters is that they can be scaled up to higher powers. Switching control can be difficult with push-pull converters, because care has to be taken not to turn on both switches at the same time. Doing so will cause the equal and opposite flux in the transformer, resulting in a low impedance and a very large shoot-through current through the switch, potentially destroying it.
The other disadvantage to the push-pull topology is that the switch stresses are very high (2∙VIN), which makes the topology undesirable for 250VAC and PFC applications.
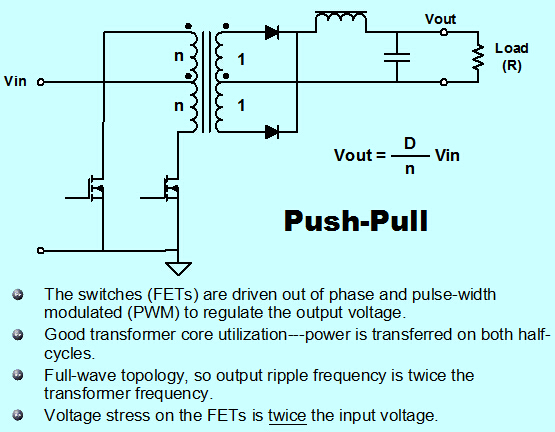
Push-Pull
8. Half-Bridge
The half-bridge topology, like push-pull topologies, can be scaled up well to higher power levels and is based on the forward converter topology. This topology also has the same issue of the shoot-through current, if both switches are on at the same time. In order to control this, there needs to be a dead-time between the on-time of each switch. This limits the duty-cycle to about 45%. Beneficially, the half-bridge topology switching stresses are equal to the input voltage and make it much more suited to 250VAC and PFC applications.
On the flip side, the output cur- rents are much higher than the push-pull topology, thereby making it less suited for high current outputs.
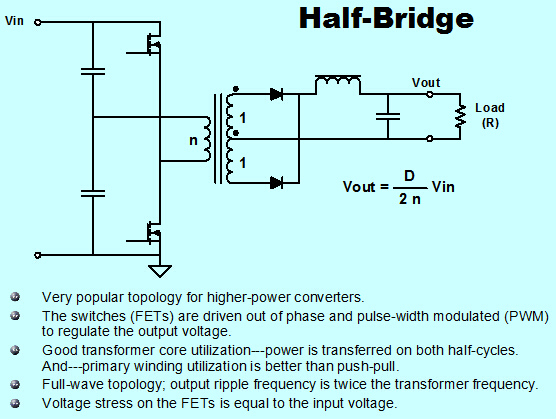
Half-Bridge
9. H-bridge (Full-Bridge)
An H-bridge is built of four switches that control the flow of current to a load, which actually is just a way to control current direction with switches. The name is given because of the physical appearance of the circuit. To reverse, let’s say, a motor, the supply must be reversed and this is what the H-Bridge does, also the most typical application of an H-bridge circuit is motor control. There are a number of different H-Bridge designs and the actual circuit will depend on the number of transistors, the type of layout, the number of control lines, the voltage of the bridge and a number of other factors. That's why we have a number of different designs to cover these variations. One thing that has to be very cautious about when working with H-bridges is to not create a short circuit. If you create a short circuit, that’s a sure way to burn out your H-bridge.
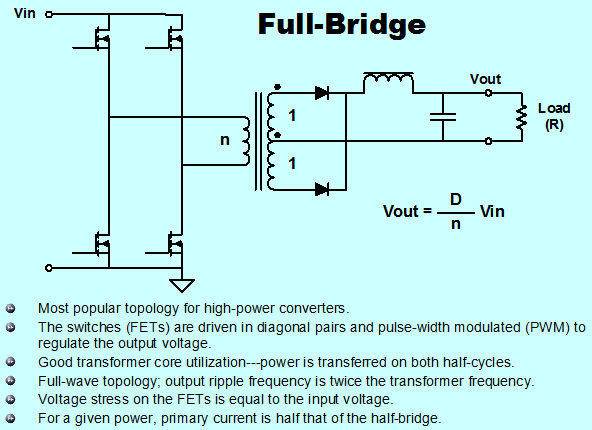
Full-Bridge
10. Resonant LLC
The resonant LLC topology is a half-bridge topology that uses a resonant technique to reduce the switching losses due to zero voltage switching, even in no-load conditions. This topology scales up well to high power levels and has very low losses in devices that are on at all times. This topology is not as well suited for stand-by mode power supplies, as the resonant tank circuit needs to be energized continuously.
The resonant LLC also has the advantage over both push-pull and half-bridge topologies of being suitable for a wide range of input voltages. The down side to the resonant LLC topology is its complexity and cost.
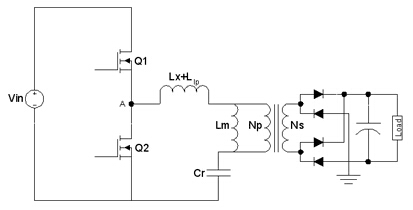
Resonant LLC
11. Single-Ended Primary Inductor Converter (SEPIC)
Don't like the inverted output voltage relative to the input voltage than consider the single-ended primary-inductor converter (SEPIC). The single-ended primary-inductance converter (SEPIC) is a DC/DC-converter topology that provides a positive regulated output voltage from an input voltage that varies from above to below the output voltage. It is a buck/boost converter topology without the inverted voltage. SEPIC converters require an additional inductor and a blocking capacitor for operation which may be off-putting at first glance, however, the continuous input current draw is beneficial for reducing electromagnetic interference (EMI). A drawback to the SEPIC topology is that they generally require a larger footprint.
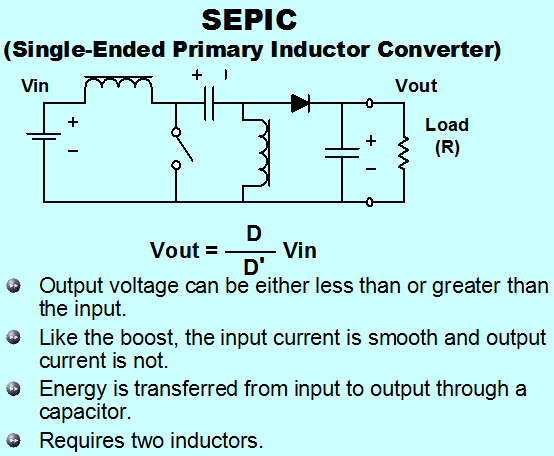
Single-Ended Primary Inductor Converter (SEPIC)
12. Ćuk
The SEPIC and Ćuk topologies both use capacitors for energy storage in addition to two inductors. The two inductors can be either separate inductors or a single component in the form of a coupled inductor. Both topologies are similar to the buck-boost topology in that they can step-up or step-down the input voltage, making them ideal for battery applications.
The SEPIC has the additional advantage over both the Ćuk and the buck-boost in that its output is non-inverting. An advantage to the SEPIC/ Ćuk topologies is that the capacitor can offer some limited isolation. Catalog coupled inductors are available for the SEPIC and Ćuk topologies, and custom inductors are readily available for special needs.
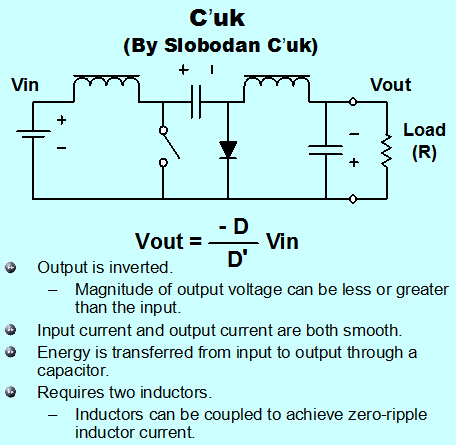
Ćuk
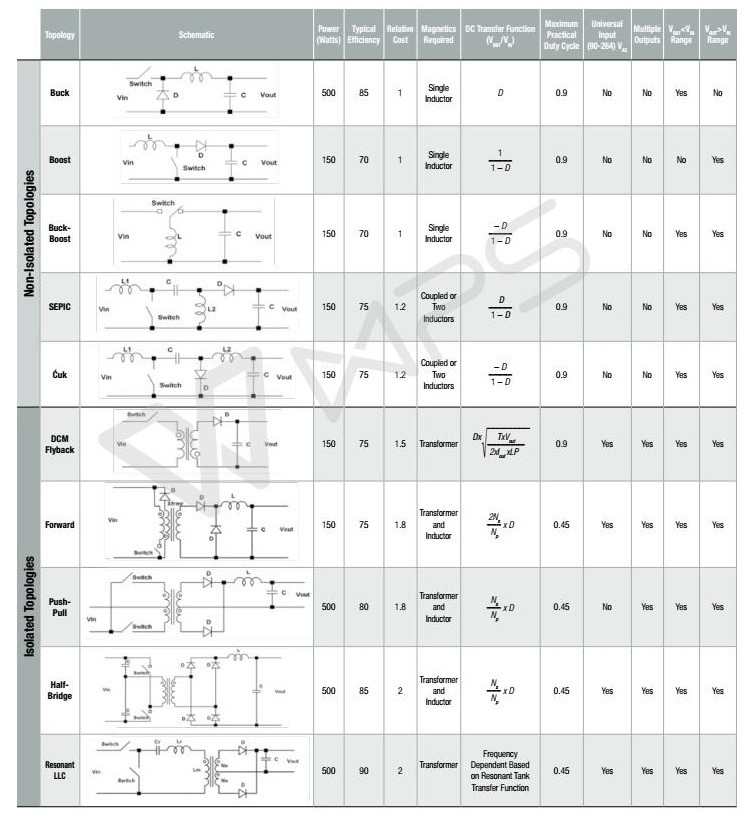

SMPS Chart
Ⅳ Details of the Circuit Operation
1. Buck Regulator (Continuous Conduction)
(1) Inductor current is continuous.
(2) Vout is the average of the voltage at its input (V1).
(3) Output voltage is the input voltage times the duty ratio (D) of the switch.
(4) When switch in on, inductor current flows from the battery.
(5) When switch is off, it flows through the diode.
(6) Neglecting losses in the switches and inductor, D is independent of load current.
(7) A characteristic of buck regulators and its derivatives:
(8) Input current is discontinuous (chopped), and output current is continuous (smooth).
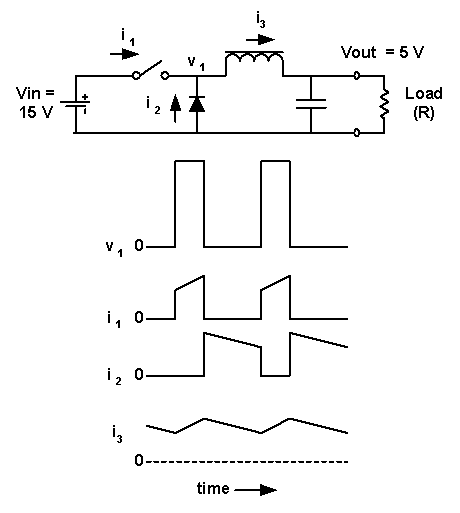
Buck Regulator (Continuous Conduction)
2. Buck Regulator (Critical Conduction)
(1) Inductor current is still continuous, but just “touches” zero as the switch turns on again.
(2) This is called “critical conduction".
(3) Output voltage is still equal to the input voltage times D.
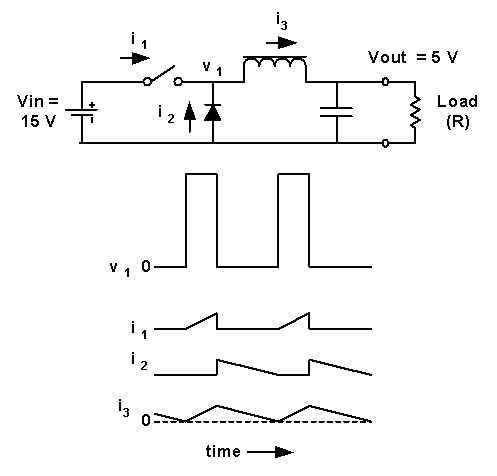
Buck Regulator (Critical Conduction)
3. Buck Regulator (Discontinuous Conduction)
(1) In this case, the current in the inductor is zero during part of each period.
(2) Output voltage is still (as always) the average of v1.
(3) Output voltage is NOT the input voltage times the duty ratio (D) of the switch.
(4) While the load current is below the critical value, D varies with load current (while Vout remains constant).
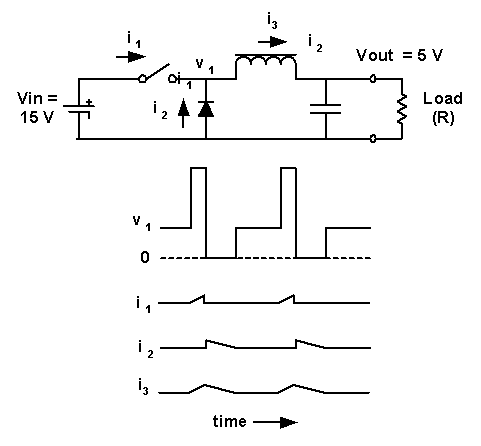
Buck Regulator (Discontinuous Conduction)
4. Boost Regulator
(1) Output voltage is always greater than (or equal to) the input voltage.
(2) Input current is continuous, and output current is discontinuous (the opposite of a buck regulator).
(3) Relationship of the output voltage to the duty ratio, D, is not as simple as in the buck regulator. In the continuous-conduction case, it is:
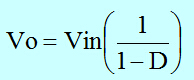
In this example,
Vin = 5,
Vout = 15, and D = 2/3.
Vout = 15,D = 2/3.
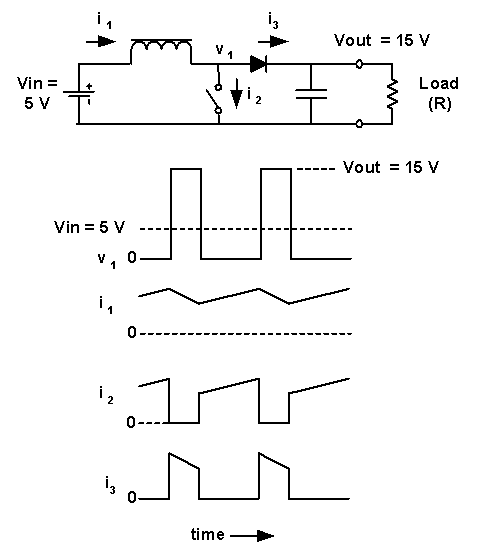
Boost Regulator
5. Transformer Operation (Including Effect of Primary Inductance)
Transformer is shown as an ideal transformer, with its primary (magnetizing) inductance as an inductor in parallel with the primary.
![]()
Transformer Operation (Including Effect of Primary Inductance)
6. Flyback Transformer (Really a Multi-Winding Inductor)
Here, the primary inductance is intentionally low, to determine the peak current and hence the stored energy. When the primary switch is turned off, the energy is delivered to the secondary.
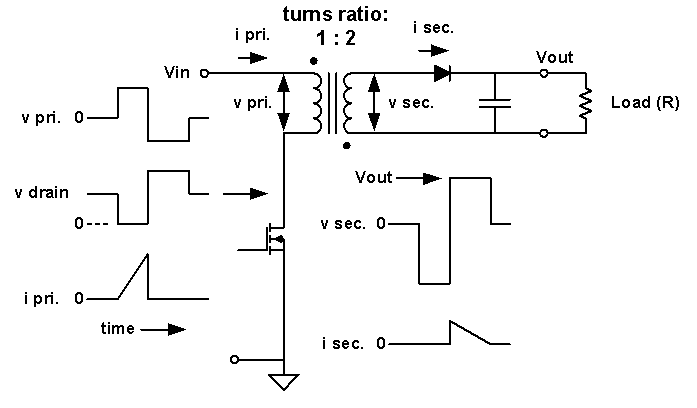
Flyback Transformer (Really a Multi-Winding Inductor)
7. Forward Converter Transformer
Primary inductance is high, as there is no need for energy storage.
Magnetizing current (i1) flows in the “magnetizing inductance” and causes core reset (voltage reversal) after primary switch turns off.
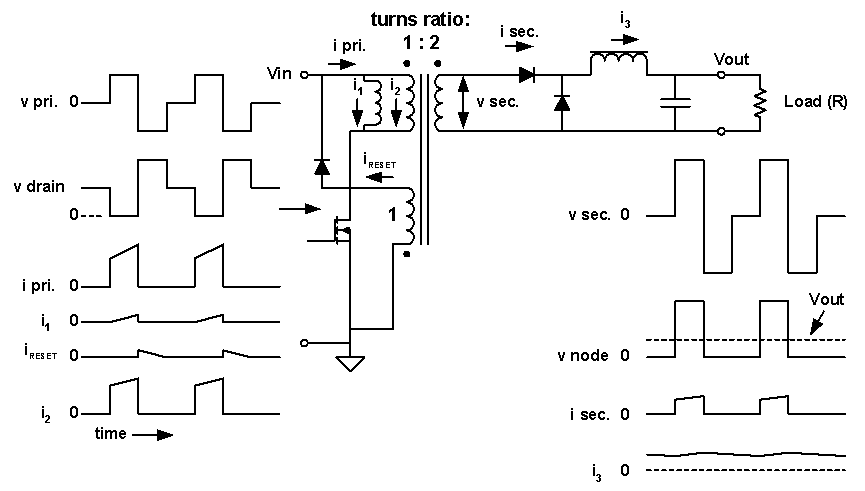
Forward Converter Transformer
V. Book Suggestions
1. Pulse Width Modulated (PWM) Power Supplies, Volume 45 (Studies in Electrical and Electronic Engineering)May 14, 1993
A restricted source of power supply is analysed in this book - namely the switching mode power supplies (SMPS), which utilise the Pulse Width Modulation (PWM) technique to operate. Interdisciplinary knowledge such as circuit theory, semiconductor devices theory and technology, magnetics theory and technology, linear and nonlinear control theory is involved in the design of an SMPS. This volume provides designers with an in-depth overview on the latest interdisciplinary methods involved in the design of switching mode power supplies, providing the reader with a tool whereby the learning time can be reduced and information about switching mode power supplies design processes can be easily accessed. The book adopts a systemic approach, subdividing the information into functional blocks whose properties and relationships are evaluated and compared with each other. A comprehensive list of references to the literature is given thus enabling the reader to follow up on more detail.
by V. Quercioli
2. Switch-Mode Power Supplies, Second Edition: SPICE Simulations and Practical DesignsAug 18, 2014
Fully updated to incorporate new SPICE features and capabilities, this practical guide explains, step by step, how to simulate, test, and improve switch-mode power supply designs. Detailed formulas with founding equations are included. Based on the author's continued research and in-depth, hands-on work in the field, this revised resource offers a collection of the latest SPICE solutions to the most difficult problem facing power supply designers: creating smaller, more heat-efficient power supplies in shorter design cycles.
by Christophe P. Basso
3. Switch-Mode Power Converters: Design and AnalysisOct 25, 2005
This book introduces an innovative, highly analytical approach to symbolic, closed-form solutions for switched-mode power converter circuits. This is a highly relevant topic to power electronics students and professionals who are involved in the design and analysis of electrical power converters. The author uses extensive equations to explain how solid-state switches convert electrical voltages from one level to another, so that electronic devices (e.g., audio speakers, CD players, DVD players, etc.) can use different voltages more effectively to perform their various functions.
by Keng C. Wu
You May Also Like:
Switched Mode Power Supply: SMPS Topologies & Formulas
Switched Mode Power Supply Design: SMPS Power Loss & Efficiency
Ten Principles of DC/DC Conversion Circuit Design
Ordering & Quality
| Photo | Mfr. Part # | Company | Description | Package | Qty |
|
MPC8360ECZUAJDGA | Company:Freescale Semiconductor - NXP | Remark:IC MPU MPC83XX 533MHZ 740TBGA | Package:740-LBGA |
MPC8360ECZUAJDGA Datasheet |
In Stock:73 Inquiry |
Inquiry |
|
DS1816R-5+T&R | Company:Maxim Integrated | Remark:IC 3.06V OD 5% SOT23-3 | Package:TO-236-3, SC-59, SOT-23-3 |
DS1816R-5+T&R Datasheet |
In Stock:7060 Inquiry |
Inquiry |
|
MC9S08AW60CFUE | Company:NXP | Remark:IC MCU 8BIT 60KB FLASH 64QFP | Package:64-QFP |
MC9S08AW60CFUE Datasheet |
In Stock:77743 Inquiry |
Inquiry |
|
MC68360ZQ25L | Company:Freescale Semiconductor - NXP | Remark:IC MPU M683XX 25MHZ 357BGA | Package:BGA |
MC68360ZQ25L Datasheet |
In Stock:811 Inquiry |
Inquiry |

|
CY62157DV30LL-55ZSXI | Company:Cypress Semiconductor Corp | Remark:IC SRAM 8MBIT 55NS 44TSOP | Package:44-TSOP (0.400", 10.16mm Width) |
CY62157DV30LL-55ZSXI Datasheet |
In Stock:1200 Inquiry |
Inquiry |
|
MCF52256AG80 | Company:NXP / Freescale | Remark:IC MCU 32BIT 256KB FLASH 144LQFP | Package:144-LQFP |
MCF52256AG80 Datasheet |
In Stock:2345 Inquiry |
Inquiry |
|
CM2020-00TR | Company:ON Semiconductor | Remark:IC HDMI TX PORT P/I 38-TSSOP | Package:38-TFSOP (0.173", 4.40mm Width) Exposed Pad |
CM2020-00TR Datasheet |
In Stock:183990 Inquiry |
Inquiry |
|
MC9S08GB32CFUE | Company:NXP / Freescale | Remark:IC MCU 8BIT 32KB FLASH 64LQFP | Package:64-LQFP |
MC9S08GB32CFUE Datasheet |
In Stock:653 Inquiry |
Inquiry |
|
H5PS5162FFK-E3C | Company:HYNIX | Remark: | Package:BGA |
H5PS5162FFK-E3C Datasheet |
In Stock:20200 Inquiry |
Inquiry |

|
TMMBAT46FILM | Company:STMicroelectronics | Remark:DIODE SCHOTTKY 100V 150MA MINMLF | Package:DO-213AA (Glass) |
TMMBAT46FILM Datasheet |
In Stock:48488 Inquiry |
Inquiry |